A*算法
算法介筛
A(A-Star)算法是一种启发式搜索方法,目前在网络路由算法、机器人探路、人工智能、游戏设计等方面有着普遍的应用。
A算法一般是以估价函数 的大小来排列待扩展状态的次序,每次选择 f(n) 值最小者进行扩展。
f(n)=g(n)+h(n)
其中g(n) 是初始结点到n结点的实际代价,而h(n)是从n结点点到目的结点的最佳路径的估计代价,且h(n)<=h(n), h(n)为n结点到目的结点的最优路径的代价。
保证找到全局最优解的条件,关键在于估价函数h(n)的选取:
- 估价值h(n)小于等于n结点到目标结点最优路径的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低,但能得到全局最优解。
- 如果估价值h(n)大于实际值, 搜索的点数少,搜索范围小,效率高,但不能保证得到全局最优解。
- 估价值与实际值越接近,估价函数取得就越好。
自动寻路问题演示
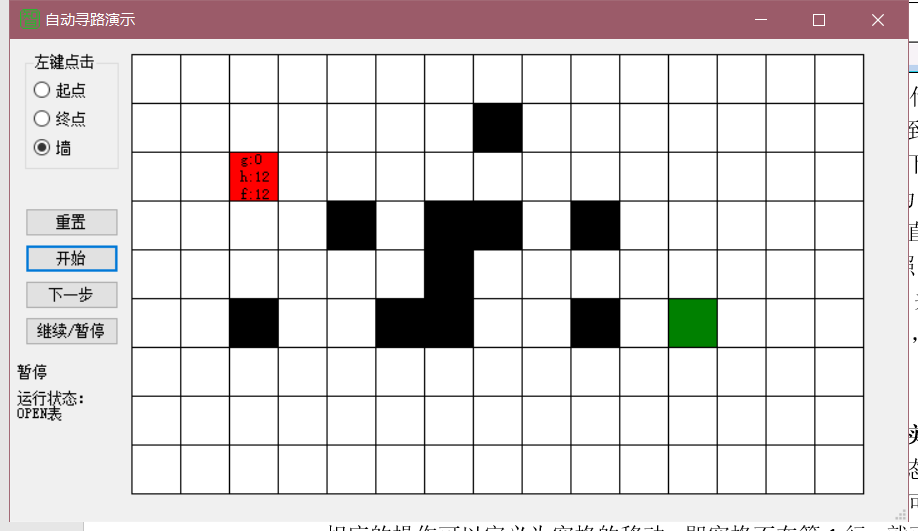
选择好起点、终点、墙后,开始第一步
估计代价h使用的是起点到终点的哈密尔顿距离,即起点到终点的横向和纵向的方格数之和
实际代价g使用的是搜索深度,即搜索步数
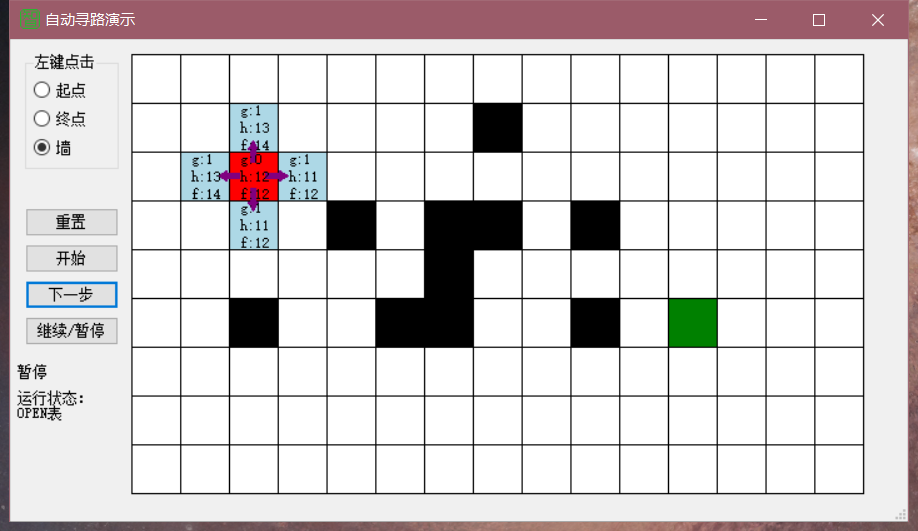
此时扩展结点的g值一定相同,而h值则根据每个扩展点的哈密顿距离的不同而不同
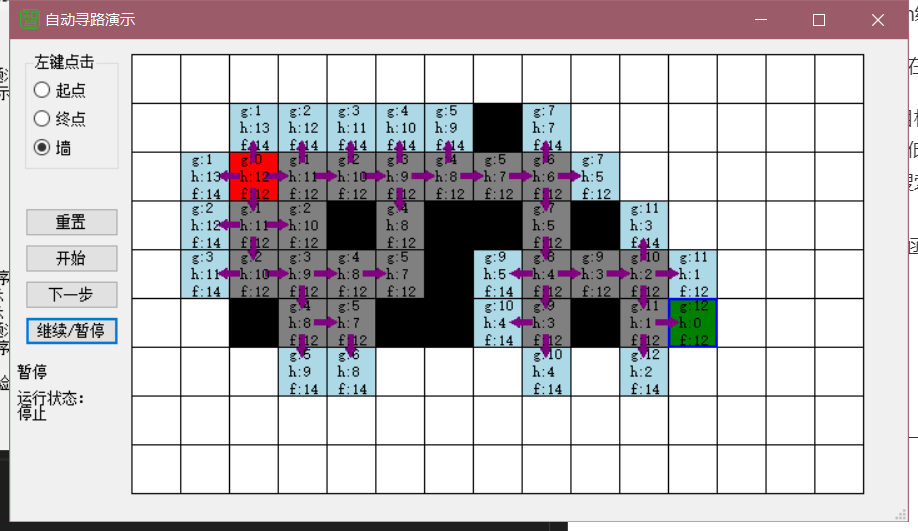
扩展点数量:39
实际代价g特点:g每走一步自增1
估计代价h:格子前进的方向h会根据最小的哈密顿距离方向行走,若有墙,则另寻次优最佳路径,到终点时的代价必为0
f到重点时的代价等于实际代价g
8数码问题演示
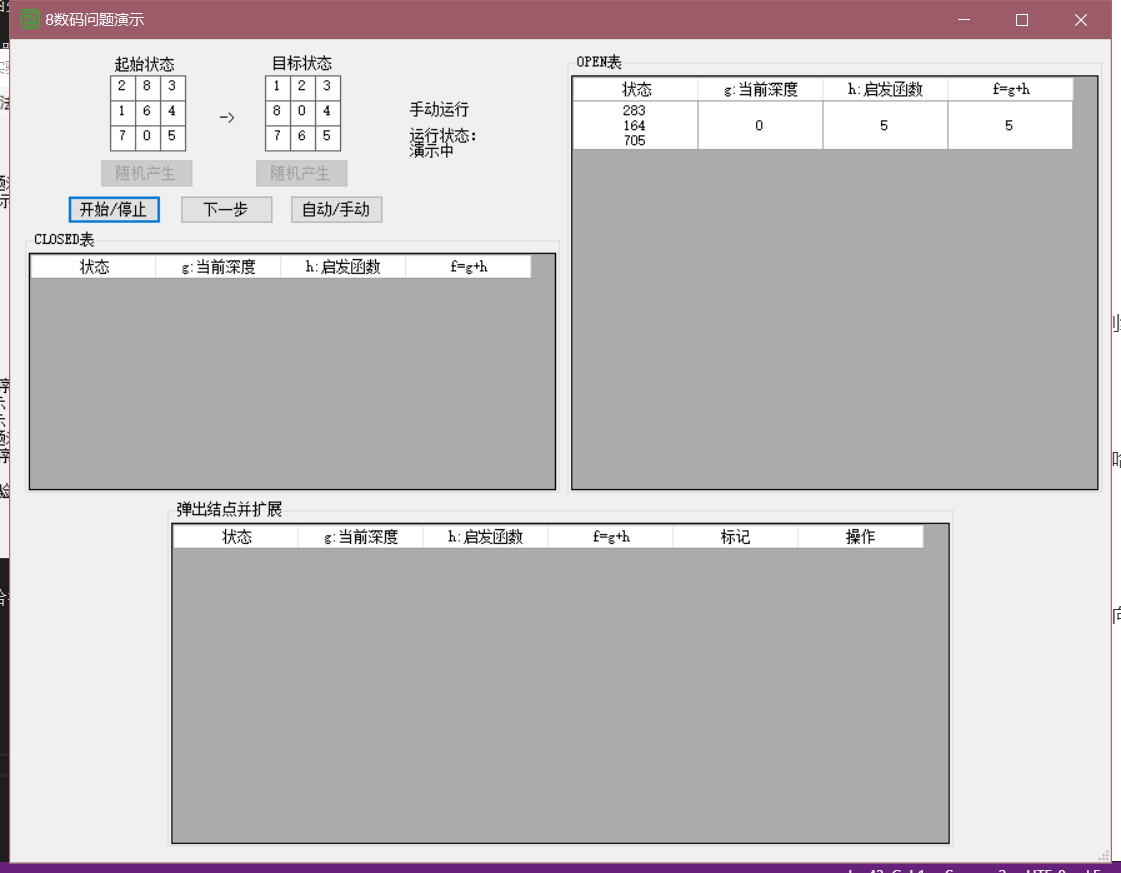
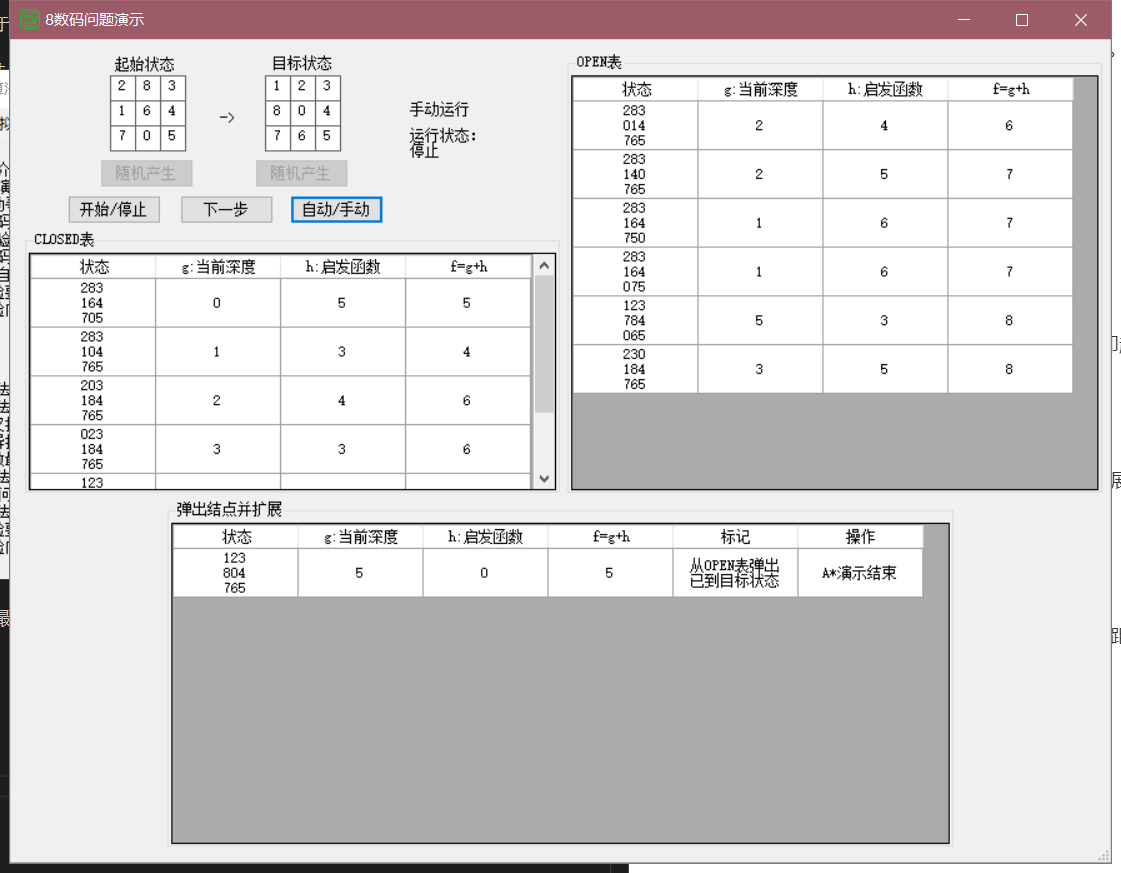
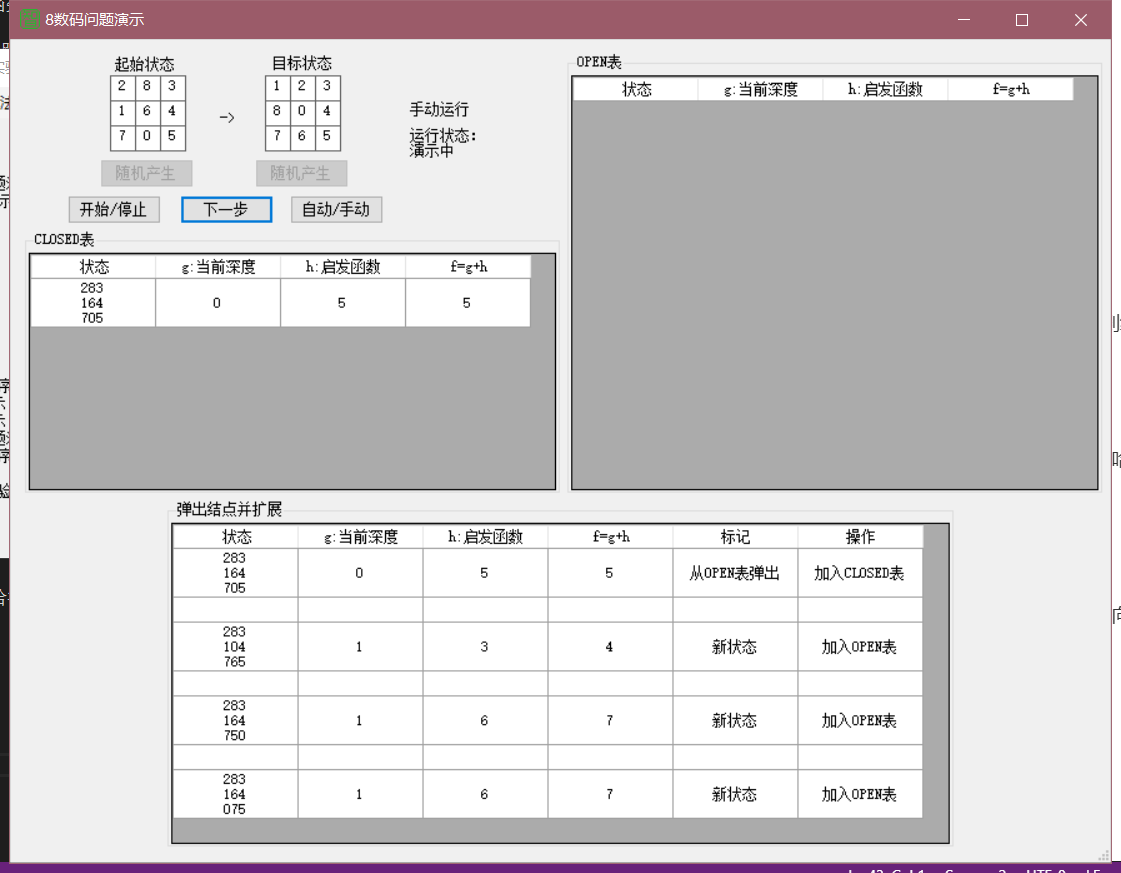
close、open表均有六个,扩展点一共为12个
实际代价g特点:g每走一步自增1
估计代价h:格子前进的方向h会根据最小的哈密顿距离方向行走,若有墙,则另寻次优最佳路径,到终点时的代价必为0
f到重点时的代价等于实际代价g
8数码问题验证
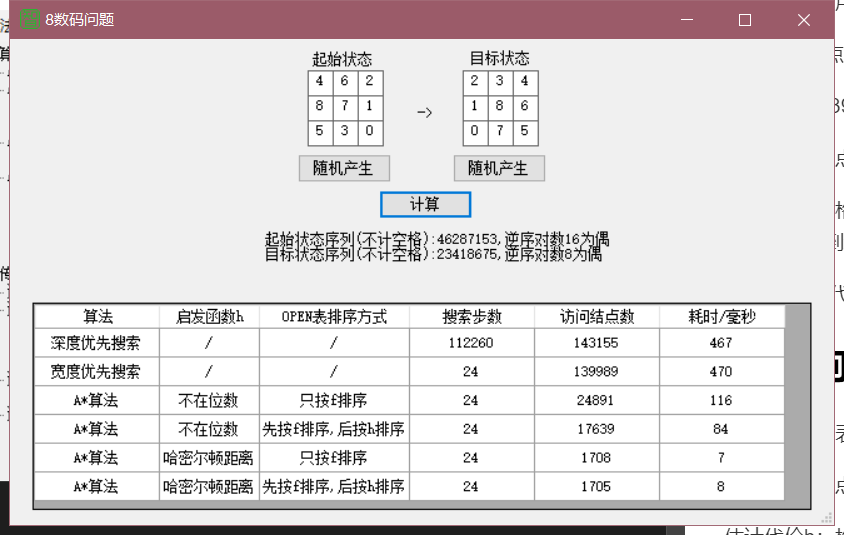
只有同奇或同偶时才有解
分析为什么A*算法和宽度优先搜索都能找到最优解,即搜索步数都是最少,但它的性能,包括访问结点数和耗时都比宽度优先搜索要少?为什么A*算法采用哈密尔顿距离作为启发函数比不在位数为启发函数的性能要好?
- 由于8数码问题的树很深,若用深度遍历算法会多余不必要的步骤,比如最优解的下一步用深度遍历来搜索可能会走一个循环,并且深度遍历的搜索思想与广度和A*的扩展思想不搭边,不能用启发性思想,所以难以找到最优解。
- 而广度优先遍历虽能找到,但也是无目的的找,而A*算法设置了g和h来引导算法更块的找到最优解
- 关于哈密尔顿和不在位数的区别课程中没有详细讲到这两个算法的区别,网上的资料有限,经过思考后还是不能想出性能不同的根本性原因。
- 个人觉得哈密尔顿适合多位数的路径查询,而不在位数更倾向与少位的搜索
8问题代码实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
|
#include<iostream>
#include<map>
#include<queue>
#include<algorithm>
#include<string>
using namespace std;
struct P{
int d;
int w;
int id;
string s;
friend bool operator <(const P &a,const P &b){
return a.d+a.w>b.d+b.w;
}
}p;
const int N=3;
const string t="123804765";
string stack[1000000];
string record[1000000];
int father[10000000];
int top=0;
priority_queue<P> pq;
map<string,bool> mp;
int calw(string s)
{
int re=0;
for(int i=0;i<9;i++) if(s[i]!=t[i]) re++;
return re;
}
int solve()
{
P cur;
while(!pq.empty()){
cur=pq.top();
pq.pop();
if(cur.s==t) return cur.id;
int x,y;
int ops=0;
while(cur.s[ops]!='0') ops++;
x=ops/3,y=ops%3;
int r=cur.id;
if(x>0){
p.s=cur.s;
swap(p.s[ops],p.s[ops-3]);
if(!mp[p.s]){
p.d=cur.d+1,p.w=calw(p.s),p.id=top+1;
pq.push(p);
stack[++top]=p.s;
father[top]=r;
mp[p.s]=1;
}
}
if(x<2){
p.s=cur.s;
swap(p.s[ops],p.s[ops+3]);
if(!mp[p.s]){
p.d=cur.d+1,p.w=calw(p.s),p.id=top+1;
pq.push(p);
stack[++top]=p.s;
father[top]=r;
mp[p.s]=1;
}
}
if(y>0){
p.s=cur.s;
swap(p.s[ops],p.s[ops-1]);
if(!mp[p.s]){
p.d=cur.d+1,p.w=calw(p.s),p.id=top+1;
pq.push(p);
stack[++top]=p.s;
father[top]=r;
mp[p.s]=1;
}
}
if(y<2){
p.s=cur.s;
swap(p.s[ops],p.s[ops+1]);
if(!mp[p.s]){
p.d=cur.d+1,p.w=calw(p.s),p.id=top+1;
pq.push(p);
stack[++top]=p.s;
father[top]=r;
mp[p.s]=1;
}
}
}
return -1;
}
void print(int x)
{
int k=0;
for(int i=0;i<N;i++){
for(int j=0;j<N;j++){
if(record[x][k]=='0')
printf(" ");
else printf("%c ",record[x][k]);
k++;
}
printf("\n");
}
printf("\n");
}
int main()
{
int tt;
cin>>tt;
for(int k=1;k<=tt;k++){
cout<<"Case "<<k<<":\n";
int i,j;
char a;
p.s="";
for(i=0;i<N;i++){
for(j=0;j<N;j++){
cin>>a;
p.s+=a;
}
}
p.d=0,p.w=calw(p.s),p.id=0;
father[0]=-1;
mp[p.s]=1;
stack[0]=p.s;
pq.push(p);
int id=solve();
if(id==-1){
cout<<"无解!\n";
}else{
int c=-1;
while(id>=0){
record[++c]=stack[id];
id=father[id];
}
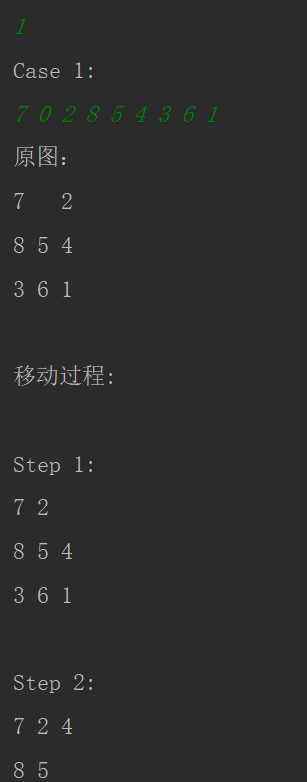
cout<<"原图:"<<endl;
print(c);
cout<<"移动过程: \n\n";
for(i=c-1;i>=0;i--){
cout<<"Step "<<c-i<<":\n";
print(i);
}
cout<<"移动结束!\n";
}
mp.clear();
while(!pq.empty()) pq.pop();
top=0;
cout<<endl;
}
system("pause\n");
return 0;
}
|
本文使用 CC BY-NC-SA 3.0 中国大陆 协议许可
具体请参见 知识共享协议
本文链接:https://zyhang8.github.io/2021/01/04/astar-algorithm/

